Who are humanoid robots
Humanoid robots
Who are humanoid robots? Robotics is a trending topic nowadays. There are different types of robots in the industry. Before you get into the humanoid robot, it is better to clearly understand what a robot is. Humanoid robots are one of the main types of robots. Humans have a complex structure and also a powerful mind & brain. This article gives a general introduction of all universal humanoid robots that available now. Is it possible to build a robot the same as humans?
Key points
- History of humanoid robots(short intro)
- Human vs. humanoid robots
- The physical structure of humanoid robots
- Grippers
- Balance and control (walking system)
- Communication
- Humanoid hands and foots
- Operating systems
- Hardware components
- Simulations
- Applications
- Famous real-world humanoid robots
- Conclusion
History
Humanoid robots origin being in ancient Greek mythology. In modern times engineers and scientists can create robots like humans call humanoid robots. Science fiction (Si-Fi)movies and some writers imagine and bring humanoid robots into their stories.
In 1972 first humanoid robot was built by Ron Wensly. Its name is Herbert televox(link). This robot could function the simple process with the help of switches. For the first time, it didn’t speak.
In 1937 the ‘elecktro motor-man’ was designed by westing house electric and manufacturing corporations, which most people consider as the first humanoid robot that can do different tasks ( for more details )
Human vs. humanoid robot
Humans are entirely biological, performing various tasks like walking, speaking, writing, and more. The human mind is Ta incredible that can think, imagine,
perception, consciousness language, and memory. The human brain controls all the body with the help of the mind (there is a link between mind and brain, the brain is physical, which we can see, but the mind doesn’t have physical structure or shape which we can’t see ).
However, humanoid robots also have a brain that doesn’t have a mind. Because of that, they can not think like humans. Now, artificial intelligence, neural networks involve in humanoid robots. As a result, they can think, speak languages, answer questions like humans, and identify emotions.
Humans need food, water, oxygen for consistency for life. Humanoid robots need a lot of data for their process. A humanoid robot is the collection of hardware without artificial intelligence neural networks and data processes. If humans don’t have a brain and mind, humans also like this just a physical body.
However, there is a vast difference between humans and humanoid robots. Humanoids have logical thinking capabilities and less emotional thinking compare with humans. Humanoids are experts in doing the same thing again and again without fewer errors.
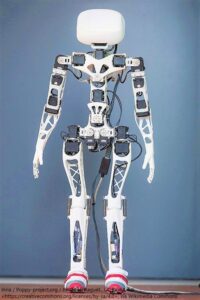
The physical structure of humanoid robots
The kinematic structure of humanoid robots has the same as the human structure (maybe some differences). Kinematic means motion analysis, control, and generation. Humanoid robots are not a simple ones. It consists of complicated things such as rigid bodies(joint models, position orientation coordinate transformation and serial link Perrell link, etc.)
Image of Skelton
Humanoid hand and Grippers
Grippers:-
need humanoid robots to hold the objects in different ways. Usually, grippers use the robot’s hands and legs. Grippers can be varied according to the humanoid robot application. In robot hands, it consists of force sensors to measure the force that affects objects.
Humanoid hand:-
None like industrial robot arms, these are the robot hands that looks like a human hand. Movement and behavior are the same as humans. It also has five fingers, similar to the human side. Each finger has a motor embedded within the outline. This hand has to compact, and lightweight should be equal to humans. Motors and finger movement should be the same and function like holding objects, pinching, move the objects, and basic hand gestures.
Balance and control of humanoid robots:-
Humans use their legs to walk. Humanoid robots also use artificial limbs to walk. Balancing is the essential part of any humanoid robot which uses legs for walks. Generally, if there are on any surface, humanoid robots can balance their body. The center of pressure is the balancing mechanism of walking robots, which means the point on the ground. (there is no angular momentum)
It is easy to balance walking humanoid robots on flat surfaces and floors. When it comes to the rough levels such as mountains, broken roads, on the stones and various surfaces which are not flat, etc. it is somewhat complex to balance the humanoid robots.
Every time humanoid robots need to find real-time controlling to allow the balance of the center of pressure. Typically, humanoid robots are considered as mass models. The mas distribution considers as on the waist. But this method is not suitable for some humanoid robots. If the model is involved or it consists of slow legs or arms, the mass distribution can be different. Such types of humanoids need sophisticated control and techniques.
Foot
The foot is an essential part of humanoid robots. It conflicts with any structure with sufficient friction to avoid slippage. It must handle the loads, forces during the walking and landing. Feet size depends on according to the humanoid robots. It also consists of six-axis force sensors at the ankles or pressure sensors under the feet. (to measure the center of position).
The materials, shape, and size of the feet are essential, which provide sufficient friction to humanoid robots.
Operation systems in humanoid robots
Middleware is a type of computer software that use to control the robotics software system. It enables to distribute process to exchange data on heterogeneous platforms
ROS(Robot Operation System), Open RTM(open-source robotics technology), YARP(Yet Another Robot Platform ) are the most commonly used middleware that uses the humanoid robot as an operating system
Hardware components:-
Humanoid robots consist of embedded computers. There are specific motherboards, and the CPU is designed for robots. Clock speed and turbo boost technologies can be increased the speed of the CPU, which helps to high mathematical and logical performances of the robots. Some advanced and bigger robots are used Powerful CPU systems. Heat dissipation is an important reason for these systems. However, it can be using various cooling methods and enough space, which can be cooling the operations efficiently.
Actuators(to moving ), sensors(to get the sense of environment and physical properties), AC/DC motors(for motions and movement ) are the common hardware component of humanoid robots.
Simulation:-
Robot simulation is a virtual environment that can test the robots without depending on the actual machine. Developers can find errors and issues during this simulation process. Practically, simulation is essential for humanoid robots because it is expensive to build and handling actual humanoid robots. There are various types of robot simulators available, such as Actin, ARS, OpenHro, ROBODK, gazebo, etc. Sometimes, requirements can be changed according to the humanoid robots, such unique cases developers and researchers build a specific software package for simulations.
Application of humanoid robots:-
Humanoid robots can use in different industries and for various purposes
- Healthcare – humanoid robot designed for healthcare purposes such as care ad assist patients, clinical applications.These robots are useful for disease management
- Educational – these humanoids are engaged with students and to teach various things and maintain a quality and well education system.
- Social – these robots interact with society such as personal assistance, handle the reception, helps to mage the work, guide the people, etc.